2D Transformation
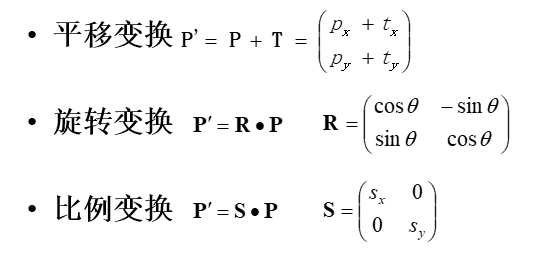
非齐次
旋转推导
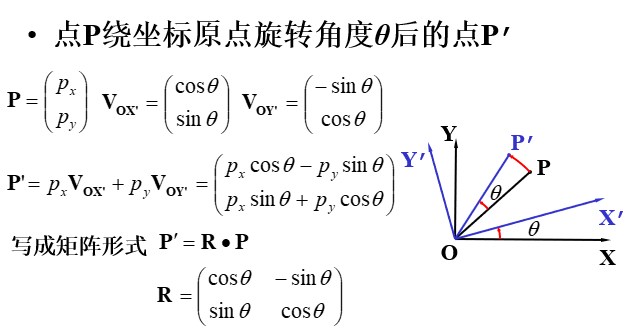 GAMES101中yan神用的是(0,1)和(1,0)代入直接求的。
注意:
GAMES101中yan神用的是(0,1)和(1,0)代入直接求的。
注意:
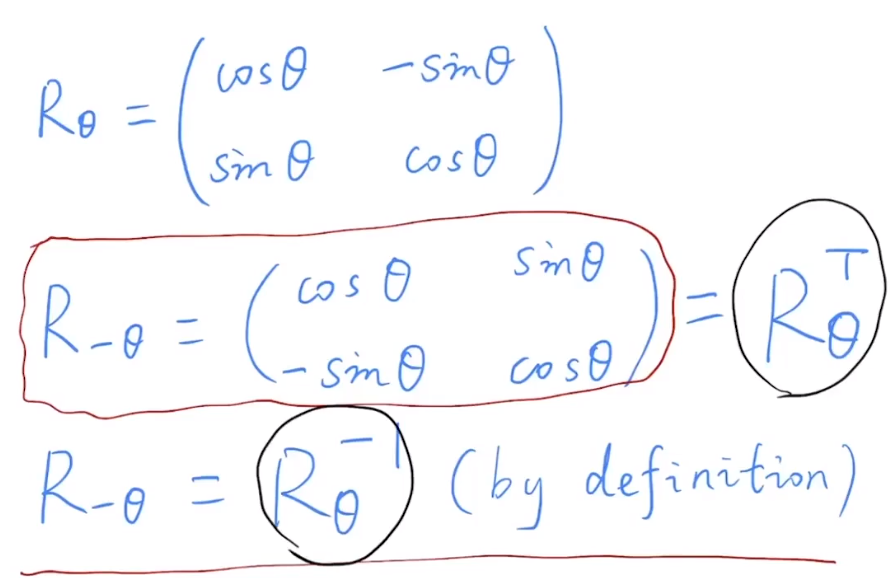 ps:是个正交矩阵,逆=转置
ps:是个正交矩阵,逆=转置
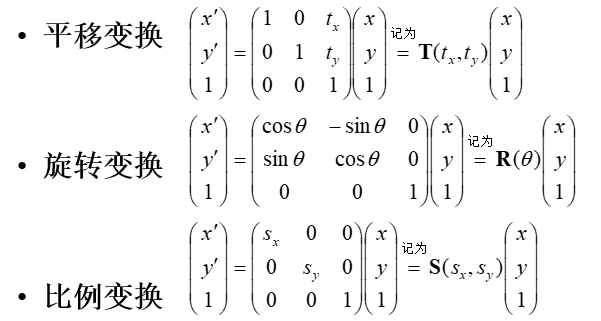
齐次
 ### 复合运算
矩阵是从右往左乘的,不能交换。
### 复合运算
矩阵是从右往左乘的,不能交换。
3D Transformation
表示和二维相似。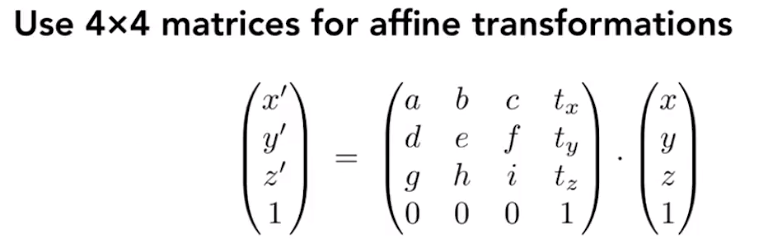
旋转
绕轴旋转
 y轴这里是反的。
y轴这里是反的。
复合旋转
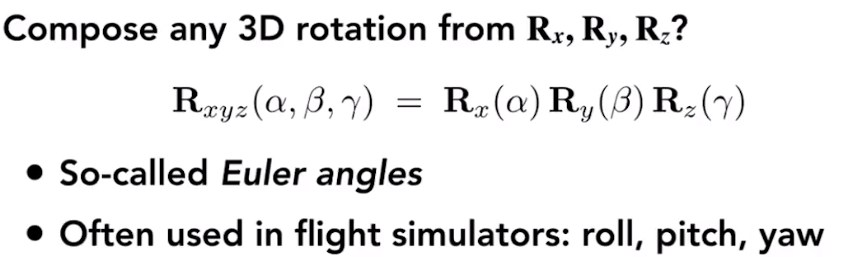 旋转可以分解到三个方向
旋转可以分解到三个方向

绕任意轴旋转 Rodrigues’ Rotation Formula
默认轴的起点在原点
把轴和物体先偏移到原点,再转,再移回去。
Viewing Transformation
从照相中学习
照相:找个好地方把人摆好(model transformation),找个好角度(view Transformation),茄子(projection transformation)
摆相机(观测矩阵初始定义)

如果相机和物体相对静止,照片会是相同的。
视图变换 View/Camera Transformation
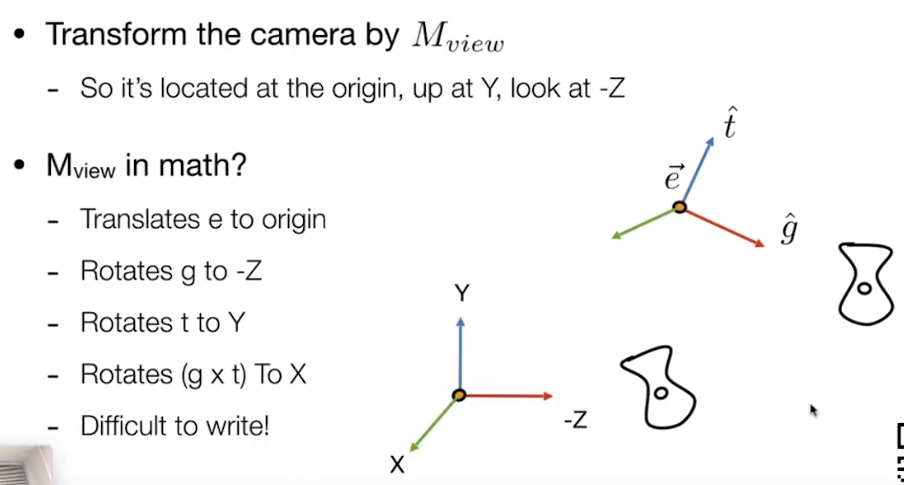 ps: 相机那里也是个正交坐标系鸭!所以g×x直接跟着转过去就好啦
ps: 相机那里也是个正交坐标系鸭!所以g×x直接跟着转过去就好啦
先平移,再旋转。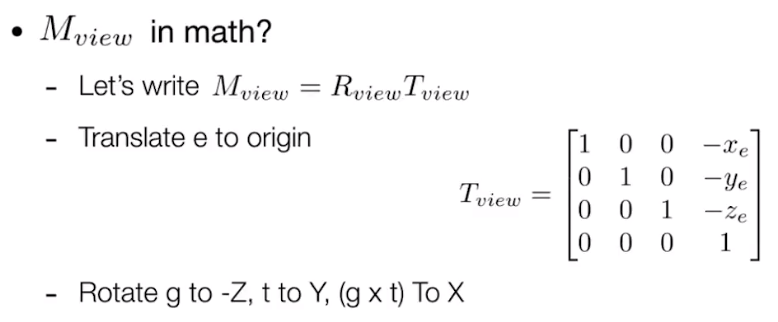
旋转矩阵先求逆矩阵就行
代入(1,0,0,0)和(0,1,0,0)(0,0,1,0)试试,其实就是左边三列。(你学废了🐎)
投影变换 Projection Transforamation
正交投影Orthographic projection
vs
近大远小的透视投影Perspective projection
ps:工图上画的就是正交投影啦2333
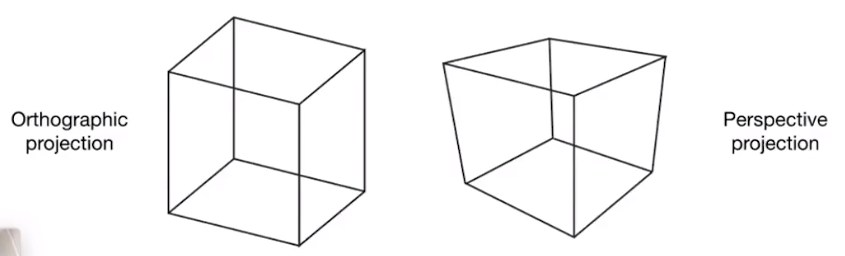 正交投影平行线一直平行,透视投影平行线最终会相交。
正交投影平行线一直平行,透视投影平行线最终会相交。
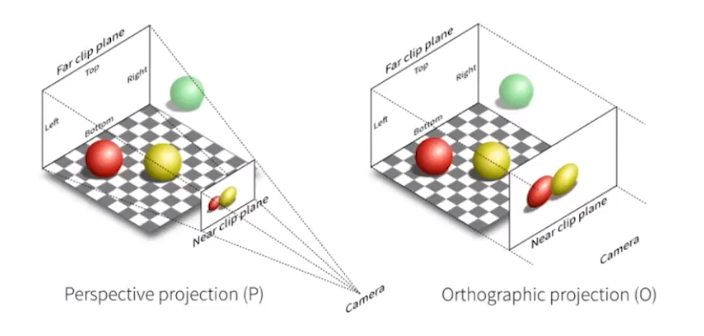 正交投影近大远小,正交投影则大小与距离无关。
正交投影近大远小,正交投影则大小与距离无关。
正交投影 Orthographic projection
一个简单的理解

通常

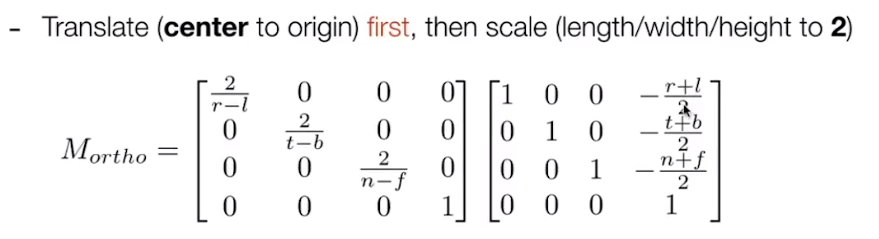
这里认为看着-z所以近n比远f坐标值大
这也是为什么OpenGL使用左手坐标系
透视投影Perspective projection
特点:近大远小,原来的平行线不平行了。
 考虑先把原平面的往里挤成个长方体,再做正交投影
考虑先把原平面的往里挤成个长方体,再做正交投影
根据相似三角形可以得到第一二行,第四行(0 0 1 0),根据近点的点不变可以猜测第三行为(0 0 A B),远平面中点不变,可以得到方程

- Post link: http://yoursite.com/2020/08/31/games101-3/
- Copyright Notice: All articles in this blog are licensed under unless stating additionally.